
Real-time image guidance and robotic motion-compensation techniques
The following study shows the importance of real-time image guidance and robotic motion-compensation techniques used in CyberKnife.
Purpose
To report the characteristics of prostate motion as tracked by the stereoscopic X-ray images of the implanted fiducials during hypofractionated radiotherapy with CyberKnife.
Methods and Materials
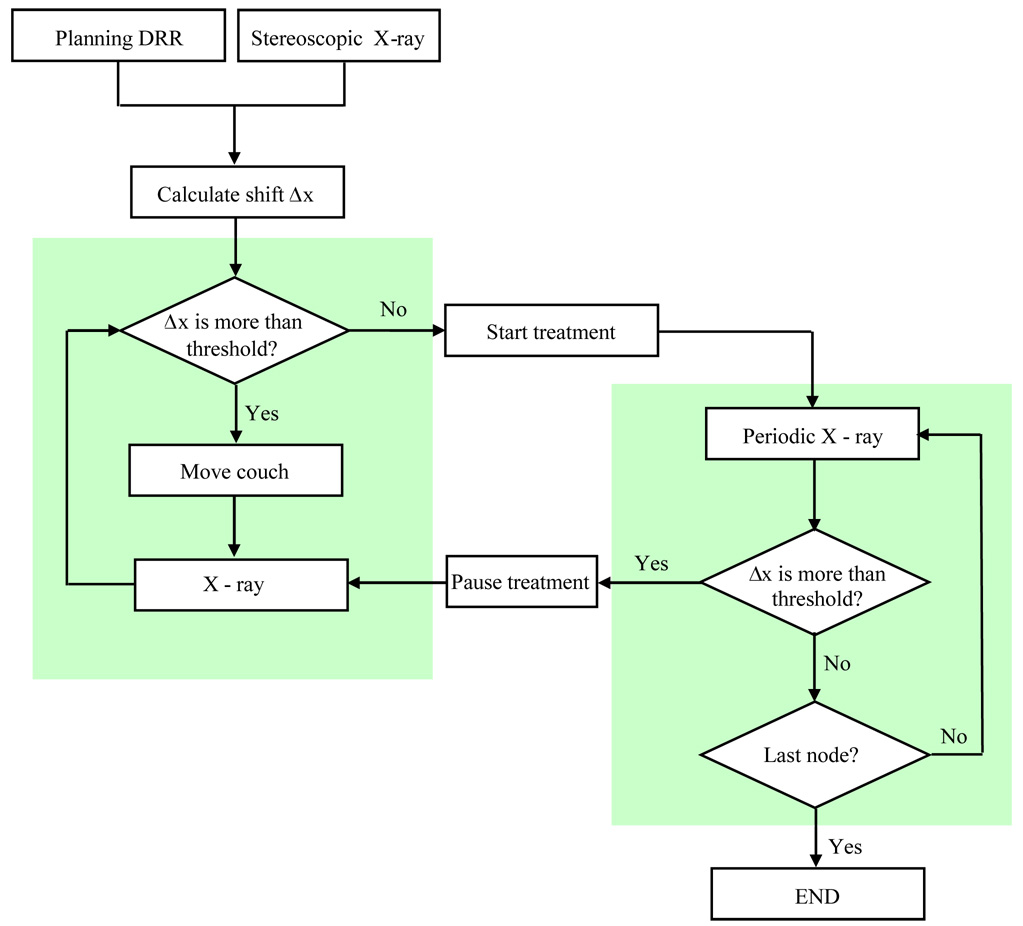
Twenty one patients with prostate cancer who were treated with CyberKnife between January 2005 and September 2007 were selected for this retrospective study. The CyberKnife uses a stereoscopic X-ray system to obtain the position of the prostate target through the monitoring of implanted gold fiducial markers. If there is a significant deviation, the treatment is paused while the patient is repositioned by moving the couch. The deviations calculated from X-ray images acquired within the time interval between two consecutive couch motions constitute a data set.
Results
A total of 427 data sets and 4439 time stamps of X-ray images were analyzed. The mean duration for each data set is 697 s. At 30 s, a motion larger than 2 mm exists in about 5% of data sets. The percentage is increased to 8%, 11%, and 14% at 60 s, 90 s, and 120 s, respectively. A similar trend exists for other values of prostate motion.
Conclusions
With proper monitoring and intervention during treatment, the prostate shifts observed among the patients can be kept within the tracking range of the CyberKnife. On average a sampling rate of ~40 s between consecutive X-rays is acceptable to ensure sub-millimeter tracking. However, there is significant movement variation among patients and higher sampling rate may be necessary in some patients.